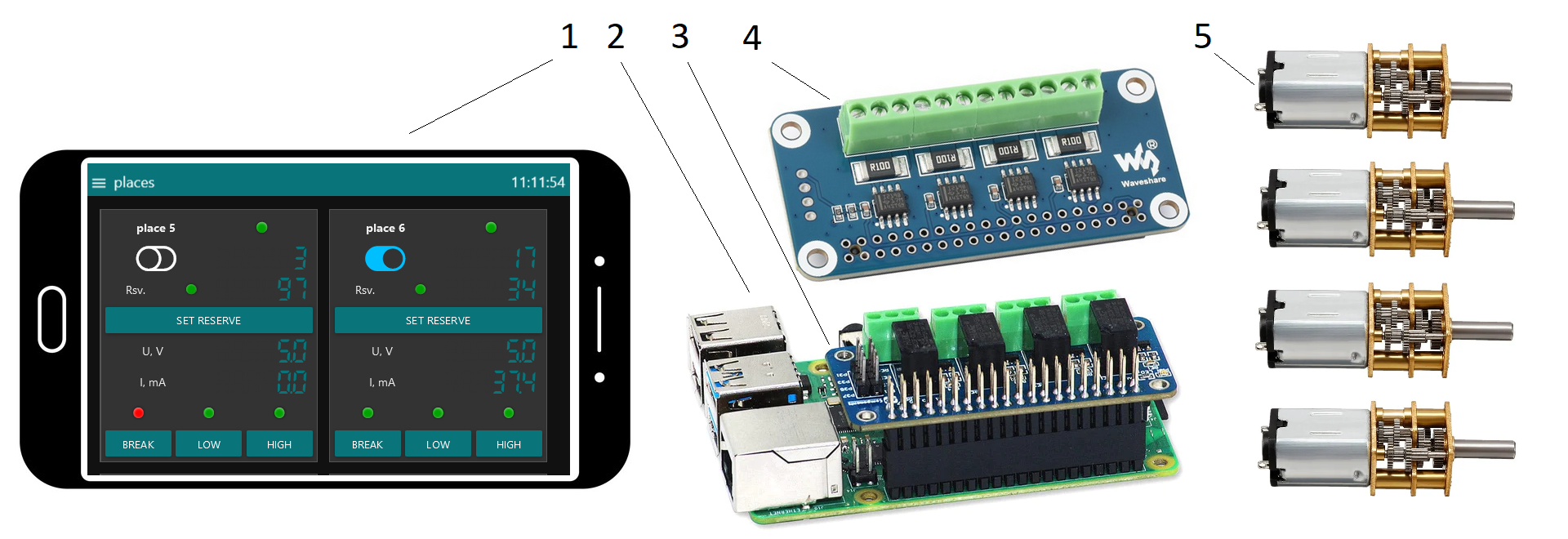
4-Kanal–Motorsteuerung (für Futterautomaten, Pumpen, Ventilatoren) auf Basis von Raspberry PI, Design in Node-Red.
1 – Smartphone /Tablet
2 – Raspberry PI mit installiertem Node-Red
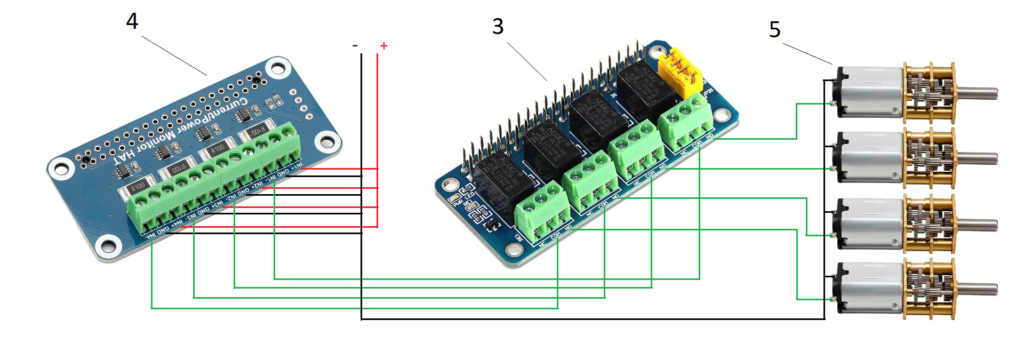
3 – Relais 4-Channel Relay Board for Pi Zero
4 – INA219 (i2c, 4-Kanäle) Waveshare Current/Power Monitor Hat
5 – Motor (5 – 24 V)
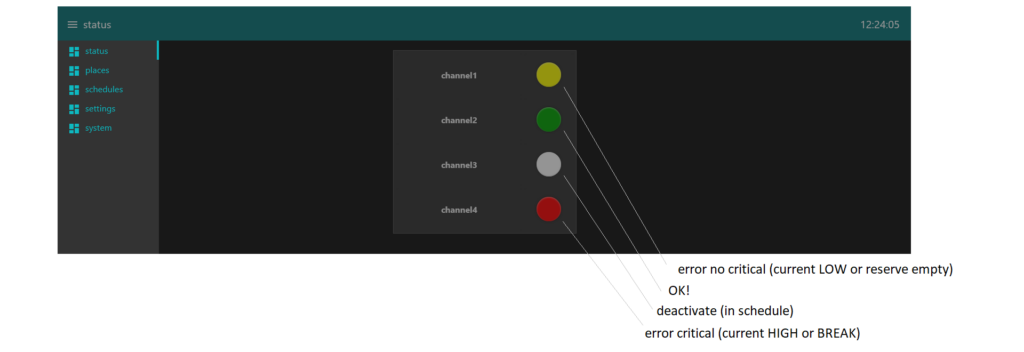
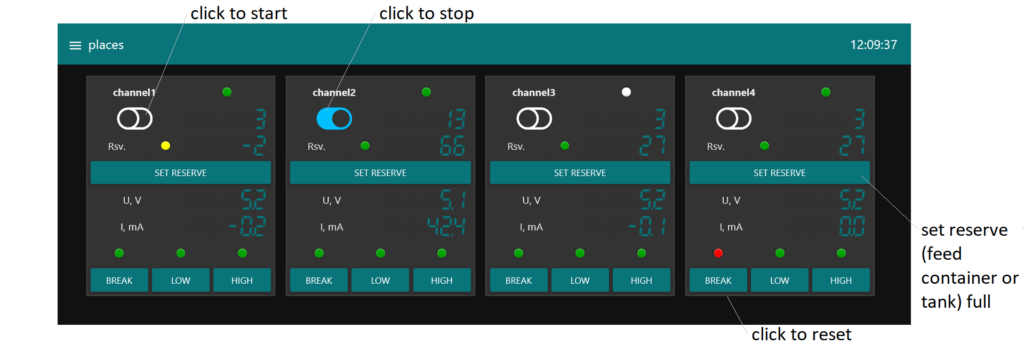
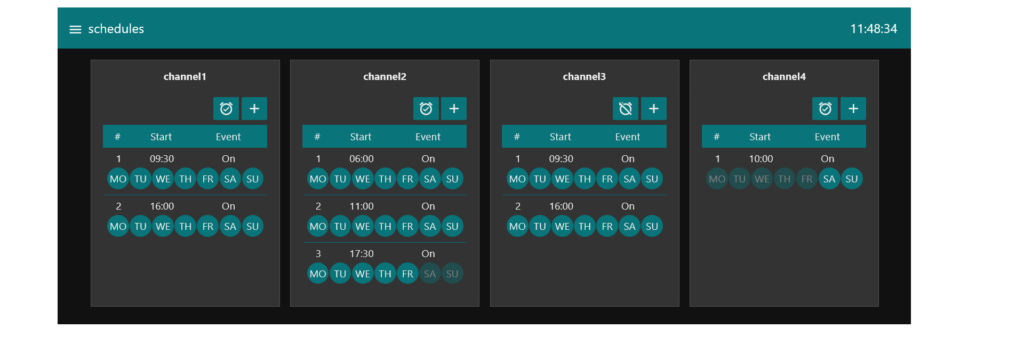
Die Motoren werden nach einem festgelegten Zeitplan ein- und ausgeschaltet. Die Überwachung des Motorbetriebs erfolgt anhand von Strommessungen im Stromkreis mit 4-Kanal-INA219 (über i2c-Bus). Fehlerbenachrichtigungen (Unterbrechung, Überlastung, Leerlauf) per E-Mail, Telegram.
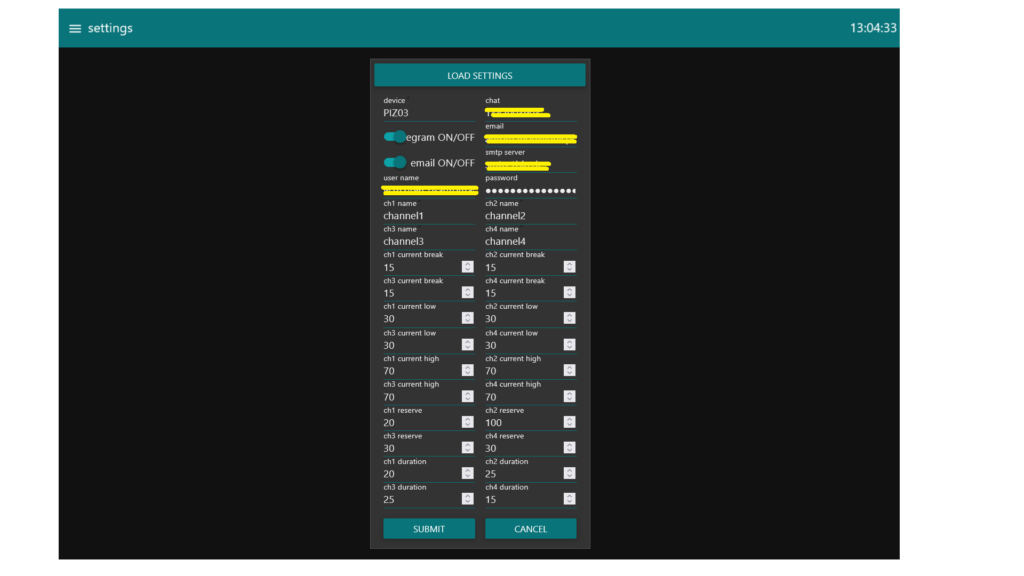
Konfiguration (Zeitplan, Werte für Bruch-, Überlast-, Leerlaufströme, E-Mail-Adresse, Telegram-Token usw.) über den Browser (Node-Red UI).
Das Smartphone / Tablet kann auch als Router verwendet werden.
Die Werte für Unterbrechungs-, Überlast- und Leerlaufströme für Motoren /Pumpen werden experimentell ermittelt.
Screenshots: